
Catmull-Rom splines
Det å lage en rett (lineær) kurve er ikke spesielt vanskelig, men det er ikke alltid at man ønsker en slik rett overgang. Spesielt naturlig bevegelse vil neppe ha den typen “hakk” som man får når man bytter mellom segmentene i en kurve med flere linjestykker (dvs. alt som er mer komplisert enn en enkelt rett linje). Derfor trenger vi noe litt mer avansert, nemlig jevne kurver, eller splines.
Denne artikkelen kommer til å gi en kort innføring i den typen splines som er kjent som Catmull-Rom-splines. De er relativt raske å beregne, og er enkle nok matematisk til at selv de mindre erfarne av oss kan følge med. (Skal du lage demoer, vil du dog aldri komme rundt at du trenger litt matte – jeg vil anta mattekunnskaper omtrent på linje med fullført 1. gym på videregående, men mer er alltid en fordel :-) )
Grunnprinsipper
Akkurat som når du lager en rett kurve, vil du ha behov for enkelte punkter du på forhånd har satt hvor skal være, altså kontrollpunktene dine. I tilfellet for en lineær kurve vil det kun være y-verdien for kontrollpunktene som må oppgis, men for Catmull-Rom-spline er man også avhengig av at man vet den deriverte i hvert av kontrollpunktene. Dette er imidlertid noe de færreste designere liker å sette manuelt (selv om det gir økt kontroll). Derfor vil jeg mot slutten av artikkelen presentere en metode for å regne ut den deriverte automatisk basert på punktene i kurven, som også gir at den andrederiverte er konstant og altså f’’‘(x) = 0. (Hvis du ikke har matematiske kunnskaper nok til å vite hva den andre- og tredjederiverte er, er det ikke nødvendig for å forstå hvordan man bruker splines; kort sagt vil det si at kurven som helhet ikke brått endrer krumning i noe punkt.)
En kurve kan teoretisk sett ha flere hundre kontrollpunkter, og vi forenkler derfor problemet med å bare behandle området mellom to punkter (et segment) av gangen (så lenge ikke endrer på kontrollpunktene mens man tegner kurven byr ikke dette på noen større problemer).
Grunnfunksjon
(Det er ikke nødvendig å lese dette avsnittet for å kunne bruke funksjonen seinere. De som ikke er så sterke i matematikk, eller rett og slett ikke har noen interesse av å følge med på utregningen, kan hoppe til den ferdig utregnede formelen.
Vi ønsker å finne en tredjegradsfunksjon y = ax3 + bx2 + cx + d som tilfredsstiller de kravene vi har satt. Det som er gitt, er punktene (x1,y1) (det første punktet) og (x2,y2) (det andre punktet), dvs. at vi kjenner f(x1) og f(x2). I tillegg har vi altså tidligere regnet ut den deriverte i begge punktene (hvordan dette skjer kommer som sagt seinere); vi kjenner altså f’(x1) og f’(x2).
Med andre ord får vi disse to ligningene når vi setter inn hhv. x1 og x2 for x:
- ax13 + bx12 + cx1 + d = f(x1)
- ax23 + bx22 + cx2 + d = f(x2)
I tillegg ønsker vi som sagt også å spesifisere den deriverte (som uttrykker stigningstallet, eller hvor fort en kurve stiger eller synker i et gitt punkt) i begge punktene. Deriverer vi funksjonen ax3 + bx2 + cx + d får vi funksjonen 3ax2 + 2bx + c, og vi har dermed disse to ligningene i tillegg til de to ovenfor (de mindre matematisk kyndige kan legge merke til at f’(x) betyr den deriverte av f(x) i punktet x):
- 3ax12 + 2bx1 + c = f’(x1)
- 3ax22 + 2bx2 + c = f’(x2)
Vi ser at siden vi kjenner x1, x2, f(x1), f(x2), f’(x1) og f’(x2), er det bare a, b, c og d som ikke er kjent, og hvis vi løser dette ligningssettet (fire ligninger med fire ukjente) vil vi komme fram til verdier for disse som vi senere kan legge inn i formelen.
En forenkling
Hvis man forsøker å løse disse ligningssettene direkte for enhver situasjon, kommer man fort opp i ekstremt kompliserte og kronglete formler. Det er derfor til stor nytte å normalisere x, dvs. å sette at den normaliserte variabelen t alltid er mellom 0 og 1 (der x = x1 vil gi at t = 0, og x = x2 vil gi at t = 1 – t er med andre ord 0 helt på begynnelsen av kurven, og 1 helt på slutten av kurven). Dette gir en annen kurve (da f.eks. t2 ikke vil gi det samme resultatet som om man regnet med x12), men ikke nødvendigvis noen dårligere kurve. Vi har to hovedfordeler med å regne med variabelen t i stedet for å bruke x-verdiene direkte:
- Punktene lenger til venstre på en kurve vil ikke kunne påvirke hvordan kurven ser ut lenger til høyre – bruker man to punkter med gitte verdier, vil den resulterende kurven se identisk ut uansett hvor på grafen den befinner seg.
- Utregningene under blir enormt mye enklere – om jeg ikke skulle brukt de normaliserte verdiene, ville dette i stedet vært en tutorial på hvordan man kunne løst ligningssett effektivt med matriser og determinanter!
Altså kan vi bruke t i stedet for x i de fire ligningene vi allerede har definert, og sette inn at t1 = 0 og t2 = 1. (Legg merke til hvor mange av leddene som forsvinner etterhvert når vi kan gjøre det slik.) Vi starter med den første ligningen og setter inn at t1 = 0:
a * 03 + b * 02 + c * 0 + d = f(0)
d = f(0)
På akkurat samme måte tar vi tak i ligning 2 og setter inn at t2 = 1:
a * 13 + b * 12 + c * 1 + d = f(1)
a + b + c + d = f(1)
I motsetning til ligning 1 gir ikke dette oss noen konstant umiddelbart, men vi lar den ligge inntil videre og setter opp ligning 3 med t1 = 0:
3a * 02 + 2b * 02 + c = f’(0)
c = f’(0)
Vi fortsetter med ligning 4, og setter inn t2 = 1 som vi har gjort før:
3a * 12 + 2b * 12 + c = f’(1)
3a + 2b + c = f’(1)
Denne kan vi jobbe videre med, og vi løser den for b:
2b = f’(1) - 3a - c
b = (f’(1) - 3a - f’(0))/2
Nå ser vi at vi har verdier for både b, c og d. Vi setter disse inn i ligningen vi fant ut fra ligning 2, og løser for a:
a + b + c + d = f(1)
a + (f’(1) - 3a - f’(0))/2 + f’(0) + f(0) = f(1)
2a + f’(1) - 3a - f’(0) + 2f’(0) + 2f(0) = 2f(1)
-a + f’(1) + f’(0) + 2f(0) = 2f(1)
-a = 2f(1) - f’(1) - f’(0) - 2f(0)
a = -2f(1) + f’(1) + f’(0) + 2f(0)
Det eneste vi mangler nå, er å sette inn denne verdien for a i uttrykket vi tidligere fant for b:
b = (f’(1) - 3a - f’(0))/2
b = (f’(1) - 3(-2f(1) + f’(1) + f’(0) + 2f(0)) - f’(0))/2
b = (f’(1) + 6f(1) - 3f’(1) - 3f’(0) - 6f(0) - f’(0)) / 2
b = (-2f’(1) + 6f(1) - 4f’(0) - 6f(0)) / 2
b = -f’(1) + 3f(1) - 2f’(0) - 3f(0)
Nå har vi alle verdiene vi trenger for formelen vår. Vi setter inn og får den ferdige funksjonen for splinen vår (jeg har fargelagt de enkelte konstantene for å gjøre funksjonen lettere å lese/forstå):
f(x) = at3 + bt2 + ct + d
f(x) = (-2f(1) + f’(1) + f’(0) + 2f(0))t3 + (-f’(1) +
3f(1) - 2f’(0) - 3f(0))t2 + f’(0)t + f(0)
En del andre splines-tutorials på nettet snur litt om på denne formelen, slik at man ikke grupperer etter t, men etter de enkelte input-verdiene man har. Det er uansett i bunn og grunn samme formel, og det er egentlig ikke noe stort poeng å gjøre formelen vanskeligere å forstå på denne måten med mindre man kanskje vil spare noen ytterst få flyttallsoperasjoner (compileren vil i de fleste tilfeller bety vel så mye her).
Praktisk bruk
Det å bruke denne formelen i praksis gir seg omtrent nesten selv: Man finner ut hvilke to kontrollpunkter som er nærmest (på hver sin side) den x-verdien man har (hvordan man ønsker å håndtere x-verdier som ikke ligger innenfor kontrollpunktene er en sak i seg selv – personlig synes jeg det er helt okay å gi en feil i dette tilfellet, og så passe på at verdiene aldri går utenfor kontrollpunktene). Deretter normaliserer man x, ved å si at t = (x - xmin) / (xmax - xmin), der xmin og xmax er henholdsvis venstre og høyre kontrollpunkt. Deretter setter man enkelt og greit inn verdien for t samt de kjente verdiene inn i formelen, og man har den ferdige verdien fra splinefunksjonen, som man da kan bruke til å generere et objekt, animere bevegelse, tegne på skjermen etc..
Utregning av den deriverte
Som nevnt holder det ikke bare å spesifisere y-verdien i hvert av punktene, man må også spesifisere en verdi for den deriverte (som altså sier noe om hvor fort grafen stiger eller synker i akkurat det punktet). Derfor vil jeg her forklare en enkel metode for å regne ut verdier for den deriverte i punktene automatisk, slik at man slipper å gjøre det selv. Endepunktene må behandles for seg (vi skal ta dem for oss seinere), men for alle andre punkter er framgangsmåten denne:
Finn stigningen mellom kontrollpunktene til venstre og høyre for kontrollpunktet du behandler, og bruk dette stigningstallet som den deriverte.
En enkel figur skulle forklare dette litt bedre:
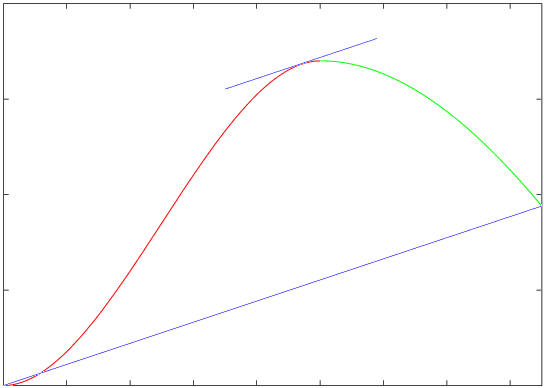
Her har vi tre punkter, og dermed to segmenter (markert med rød og grønn farge). Den øverste blå linjen markerer tangenten (husk at stigningstallet til tangenten er lik den deriverte i dette punktet). Legg spesielt merke til at denne tangenten er parallell med den nederste blå linjen, som går fra det første til det tredje kontrollpunktet (det andre kontrollpunktet er toppunktet der de to segmentene møtes, og det er i dette punktet vi ønsker å regne ut den deriverte). To parallelle linjer vil alltid ha samme stigningstall, så vi kan bruke stigningstallet til den nederste linjen til å regne ut den deriverte i det øverste kontrollpunktet. (Vi kunne selvfølgelig valgt den deriverte på en helt annen måte, men som nevnt er dette en veldig grei måte å gjøre det på, som i tillegg har fordeler mht. jevnhet i kurven o.l.)
Det å regne ut den stigningstallet for den nederste blå linjen er ingen avansert oppgave. Vi sier at punkt n har koordinatene (xn,yn), og skal altså regne ut stigningstallet mellom punkt 1 og punkt 3 (altså f’(x2)):
f’(x2) = (y3 - y1) / (x3 - x1)
Randpunkter
Metoden over fungerer naturlig nok rimelig dårlig i endepunktene, dvs. det første og det siste punktet, da disse punktene ikke ligger mellom to andre punkter man kan regne ut fra. Hvordan man skal behandle dette ser ut til å gjøres litt forskjellig forskjellige steder, og dette har nok vel så mye med smak og behag å gjøre som noe annet. (Enkelte anbefaler til og med å velge pseudo-random verdier i endepunktene!)
En nogenlunde grei metode er rett å slett å `loope’ splinen, dvs. å tenke seg at man setter første og siste punkt sammen, og dermed bruker nest siste punkt som `venstre’ og første punkt som `høyre’ når man skal regne ut den deriverte for det første og det siste punktet (disse vil dermed få den samme deriverte, hvilket absolutt ikke er en dum ting om du har tenkt å la noe følge den samme splinen flere ganger etter hverandre). Pass bare på at hvis ikke det første og det siste punktet ender i samme y-verdi, kan du få litt uventede resultater om du ikke kompenserer for dette når du regner ut stigningstallet. Med denne korreksjonen vil formelen for den deriverte i det første og det siste punktet bli:
f’(x0) = f’(xn) = ((y1 - y0)
- (yn - yn-1)) / ((x1 - x0)
- (xn - xn-1))
(Det å skrive formler i HTML er ikke akkurat leselig – hvis alle hadde støttet MathML ville ting vært litt greiere ;-)
Man regner altså i dette tilfellet ikke direkte fra det ene punktet til det andre, men går via kontrollpunktet i midten (dette kan også gjøres for alle de andre punktene, men man vil få nøyaktig samme verdier uansett, så det er ikke noe stort poeng).